Connected autonomous vehicles using DDS in engineering education
As connected autonomous vehicles are becoming a reality, it becomes paramount to introduce the fundamentals and the design concepts of such systems into engineering curriculum. From a different perspective such systems offer an exciting platform for enhancing student motivation and sense of mastery. During the spring semester of 2015, the intelligent automation systems graduate course at the department of Industrial Engineering and Management, Ben-Gurion University focused on autonomous mobile robot systems, with a specific emphasis on IOT connected autonomous vehicles. To facilitate student understanding of the theoretical and practical foundations along with the complexities of such systems the curriculum was designed around a collective bottom up construction of an autonomous driving system based on a team of EV3 Lego robots and a 3m squared road map (Fig 1). The course was divided into two sections: autonomous mobile robots and connected autonomous vehicles. As part of the course requirements, the students, divided into teams, constructed two mini projects implementing the theoretical concepts studied within each section. For the first project the teams were required to build a mobile robot capable of staying on the road and driving between junctions according to the shortest route (calculated offline). The robot was additionally required to stop before each junction and in case of identifying an obstacle (e.g., a car in front of the robot) not to get closer than a given distance from it.The theoretical concepts studied included robot design, path planning, and motion control (Fig. 2). For the second project the robot was additionally required to communicate with a central traffic control system before and during crossing of each junction. The theoretical concepts studied included team control, communication, and software design. RTI DDS was used for illustrating data-centered system design and programming and for communication quality-of-service design. One team additionally implemented an online visualization of traffic congestion using Excel DDS add-on. The ease of constructing applications using Lego EV3 and RTI Connext, along with adherence to a simplified environment (planar surface, right-angle turns, and color-based information) enabled hands-on appreciation of both low and high-level concepts including design, control, communication, and collaboration issues. During the final exam the students successfully discussed system safety features and ethical considerations and designed a data centered implementation of an IOT application for connected vehicles, e.g., using the autonomous car as a delivery option for online purchased goods, or an online pizza purchase to-go App (Fig 3).
More details about the Integrated Manufacturing Lab in which the course took place can be found in:http://in.bgu.ac.il/en/engn/iem/IMT/Pages/default.aspx
![]()
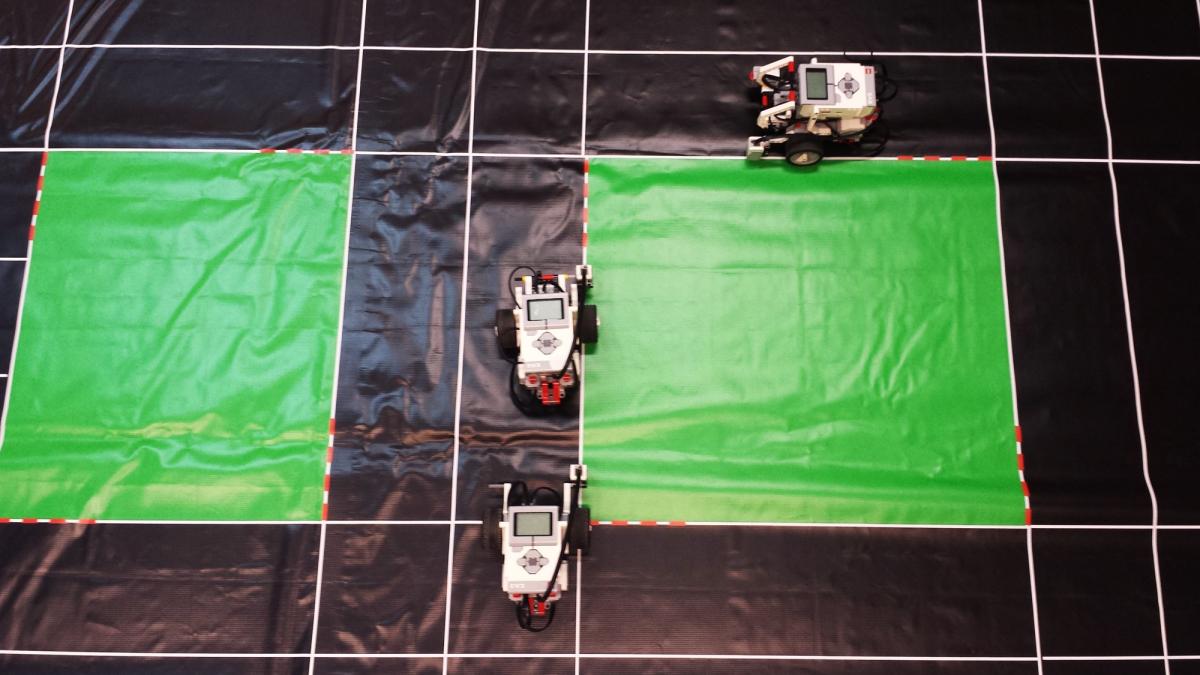
Figure 1: Three EV3 Lego robots on the road map
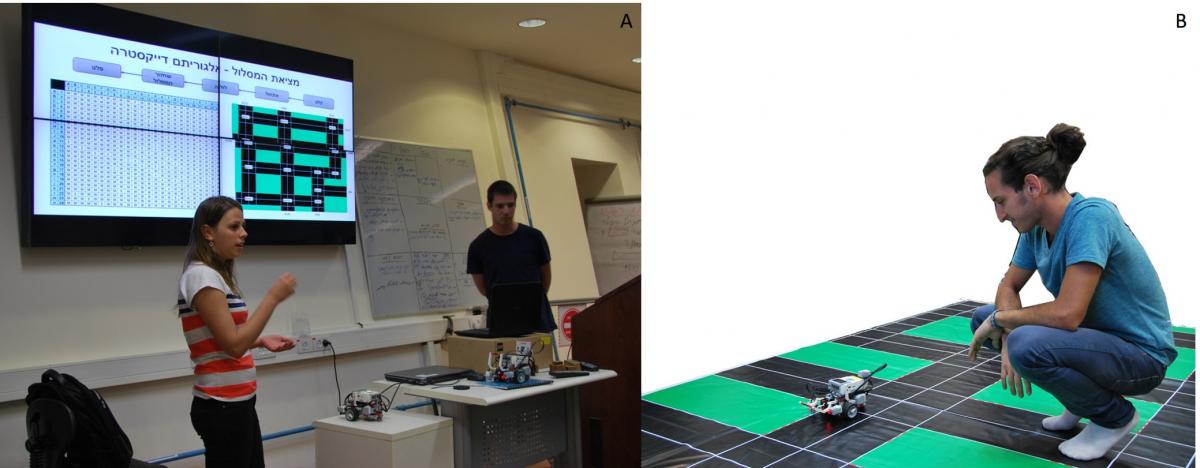
Figure 2- A: Two students presenting their path planning algorithm. B: A student closely monitoring his robot during project presentation
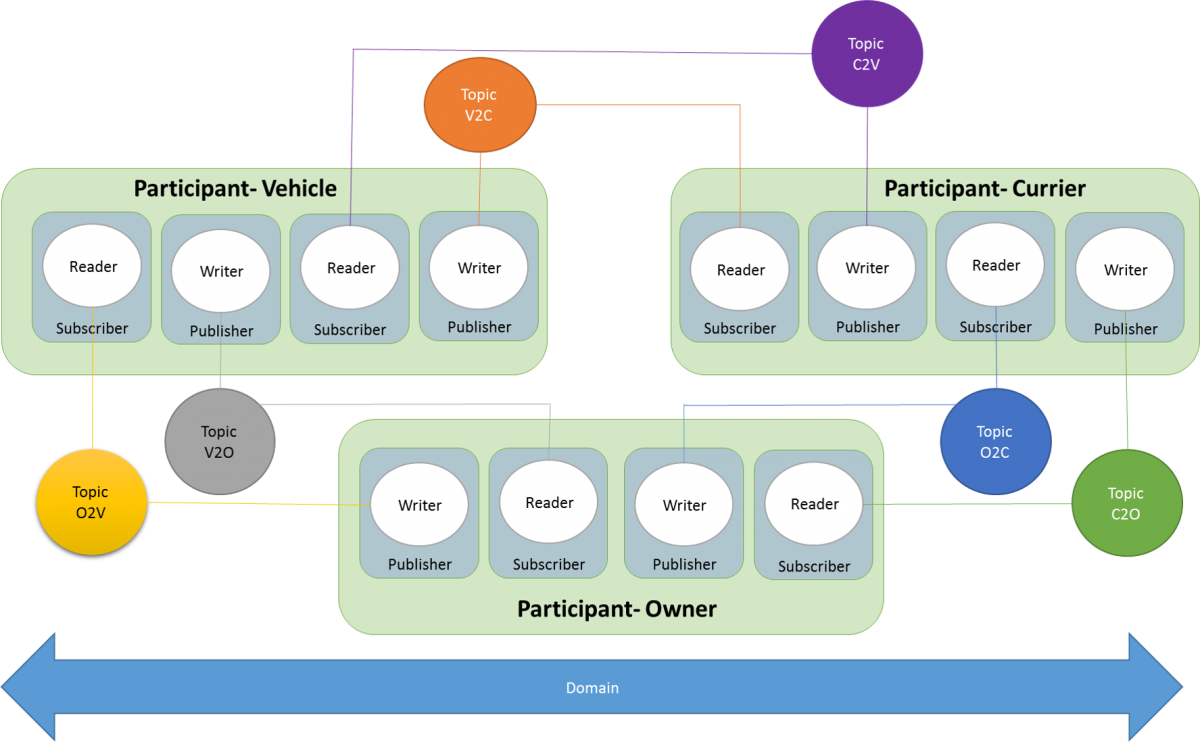
Figure 3: Suggested design for using the customer’s autonomous vehicle as a currier by the delivery company
